柱面定位图
适用范围:柱面定位一般适用于圆筒状构件的检测,包含无封头端面和有封头端面两种。一般适用于工业现场中带封头或不带封头的罐式压力容器,如各种化工反应器、气瓶、卧罐、柱罐、塔器等,实验室中的环桶状构件。
设置方法
1)视图建立
选中某一空白视图(出现红边框),在【视图】菜单中的“视图类型”中点击【定位图】,在弹出的定位图类型中选择【柱面定位图】,即完成创建默认柱面定位视图;
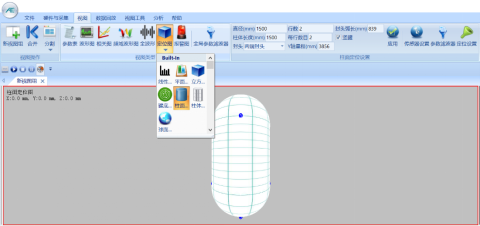
柱面定位默认视图
2)视图修改
柱面定位图软件支持快速修改方式,可通过设置直径、柱体长度、传感器排布等信息,然后按均等分形式分配;也可以根据实际情况修改传感器数量和相对距离进行人工手动设置。
人工手动设置
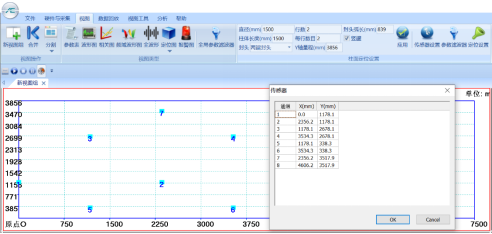
NO1.首先确认所有传感器相对于1#传感器的X、Y坐标信息,然后在简单修改的基础上,点击【传感器设置】按钮,在界面中直接修改数值即可;
NO2.通道”列下面的编号为传感器编号,一般与主机通道号一致,也可以改变为用户希望的编号,选中通道下面的数字直接修改,注意修改完的编号不应与现有的编号重复;
NO3.X列下面的数值为距离坐标原点的水平距离,Y 列下面的数值为距离坐标原点的垂直距离,可根据实际情况直接输入即可。
NO4. 修改完毕后,直接点击当前界面的【OK】键即可。
简单修改
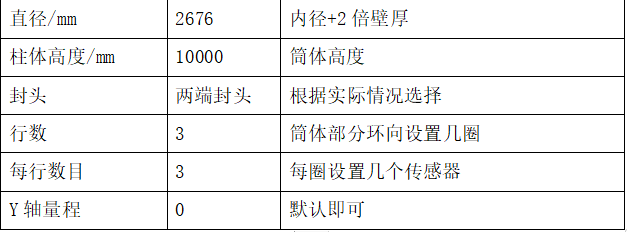
NO1.选中默认的定位视图(出现红边框),然后在‘视图’界面中修改“直径”、“柱体长度”、“封头类型”、“行数”、“每行数目”“Y轴量程”和“封头弧长”等;
NO2. 点击【应用】即完成设置。然后参考软件给出的坐标位置进行传感器布置安装。
柱面定位图视图坐标修改
界面名词解释 直径:
柱体部分,即圆筒部分的外径尺寸,单位mm,直接输入即可;
柱体长度:
一般指除封头后筒体部分的长度,单位mm,直接输入即可; 封头:
封头此处代指端面,包含“无封头”、“上封头”、“下封头”、“两端封头”,可根据被检对象实际情况选择类型;
行数:
指传感器在柱体部分布置的圈数或排数,(不包括顶部和底部),设置范围为1~50(整数),在文本框中直接输入即可;
每行数目:
每一圈或排布置的传感器的数目,(不包括顶部和底部),设置范围为1~50(整数),在文本框中直接输入即可;默认采用周长均等分的形式; 封头:指根据容器的接口选择是否具有封头和封头的类型;
封头:
指根据容器的接口选择是否具有封头和封头的类型; Y轴量程:显示范围,一般设置大于“柱体长度”+“2倍封头长度”,在文本框中直接输入即可;
封头弧长:
封头中心到相邻环缝的表面距离,在文本框中直接输入即可;
竖罐:
三维立体显示中定位图的显示方式,选后默认立式。
定位图左上角X/Y:
鼠标光标停留当前位置的坐标,参考位置为定位图左下角坐标原点;
Event Counts:
当前定位图上所生成的时差定位事件数;
视图右键菜单功能
查看定位参数:
定位图鼠标右键调出,选中后出现用于“定位集中区评价”的红色圆圈,如此区域覆盖并确定在定位点上,生成定位点的参数信息将显示在“参数表”中;
导出到EXCEL:
定位图鼠标右键调出,将定位点信息导出,包含坐标信息和参数信息等;
平面显示:
将三维建模转换为平面二维建模显示。
举例
举例对象:单壁立(卧)式容器声发射整体检测
一、由定位图确定传感器实际位置
对照软件默认传感器位置参数,在实际被检对象上确定位置
1.1根据衰减特性和信号幅度确定传感器最大间距,本方案参考间距不大于5米
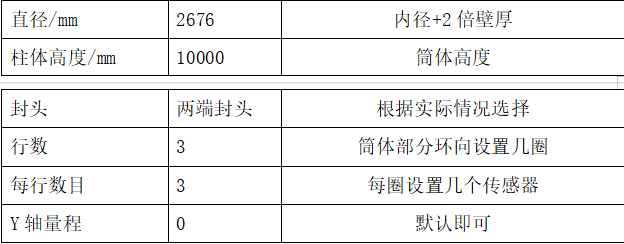
1.2在选中的柱面定位图中设置如下基本信息,预设4X3+2=14个传感器
1.3点击设置信息位置右侧【应用】按钮
1.4点击【传感器设置】,此时弹出窗口,基本信息如下:
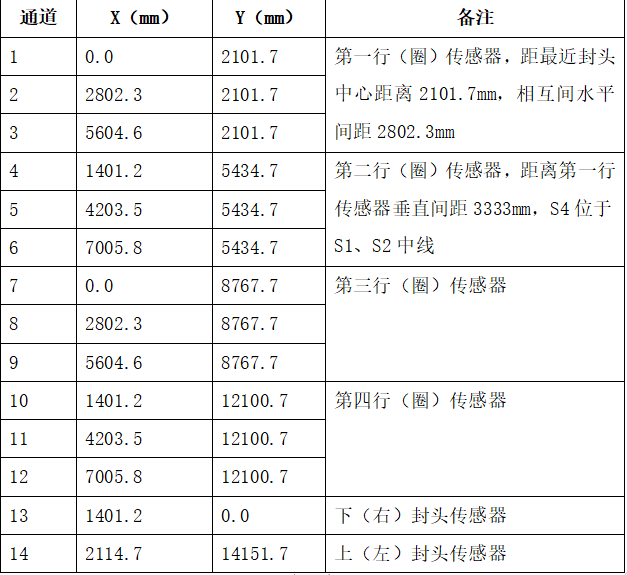
1.5 由默认传感器位置参数,在实际被检对象上确定位置
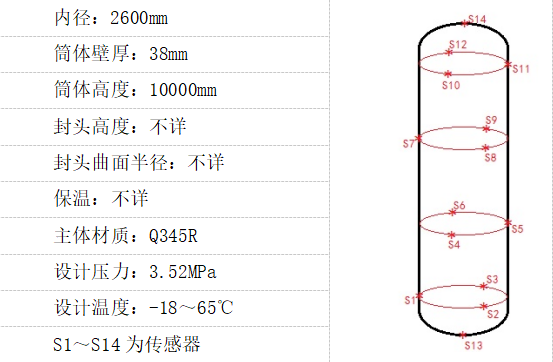
1.5.1 确定S13传感器位置,位于下封头或者右侧封头中心;
1.5.2 由1.5.1确定的封头中心位置垂直向上(水平向左)测量2101.7mm确定第一圈传感器位置,该值近似=周长(外径)/4;
1.5.3 结合其它传感器大致位置确定S1传感器位置,尽可能的让所有传感器避开接管、支撑、检查孔等不连续位置;
1.5.4 S1传感器逆时针方向为S2和S3,水平间距2802.3mm,即三等分
1.5.5 由第一行(圈)传感器垂直向上(水平向左)3333mm一圈为第二圈传感器位置,S4传感器位于S1和S2传感器中线上,S5和S6传感器在逆时针方向,水平间距2802.3mm;
1.5.6 垂直向上(水平向左)3333mm为第三行(圈)传感器S7~S9所在层,位置参考第一行(圈);
1.5.7垂直向上(水平向左)3333mm为第四行(圈)传感器S10~S12所在层,位置参考第二行(圈);此时下封头及筒体部分传感器位置确定;
1.5.8 测量第四行(圈)传感器所在层到上(左)封头中心位置的距离,记为Z1;
1.5.9 修改定位图传感器坐标设置,列表中14号传感器Z值设置为第四圈的Z值+Z1值即可
1.5.10 点击窗口中【OK】或者【确定】即可
二、实际条件建立柱面定位图(传感器位置打磨可参考)
2.1根据衰减特性和信号幅度确定传感器最大间距,本方案参考间距不大于5米,以下提及的距离值为理论值或者假设值,实际以测量值为准;
2.2 大致预设每圈用3个传感器,相互间水平间距约2802.3mm;
2.3 综合容器整体情况,尽可能的让所有传感器避开接管、支撑、检查孔等不连续位置,确定S1传感器位置;本部分将S1传感器确定在筒体部分内侧,近临下环缝位置,逆时针为S2、S3,间距2802.3mm
2.4 筒体高度10000mm,行数4即4圈可保证同阵列最大传感器间距不大于5米,确定层间距2500mm
2.5 相邻行(圈)传感器等腰三角形交叉,水平三等分布置,第一圈(行)传感器为S1~S3,第二圈(行)传感器为S4~S6,第三圈(行)传感器为S7~S9,第四圈(行)传感器为S10~S12,同行(圈)间距2101.7mm,相邻行(圈)间距2500mm;
2.6 确定下(右)封头坐标:测量第一行(圈)传感器位置到附近封头中心距离,定义为Z1,假设为2200mm
2.7 确定上(左)封头坐标:测量第四行(圈)传感器位置到附近封头中心距离,定义为Z2,假设为2200mm
2.8 根据2.1~2.7,确定传感器布置方案,筒体部分布置4行(圈),每行(圈)3个,封头中心各一个,共4X3+2=14个;
2.8.1 在选中的柱面定位图中设置如下基本信息,点击设置信息位置右侧
【应用】按钮
2.8.2 点击【传感器设置】,此时弹出窗口,基本信息如下:

2.8.3 点击窗口中【OK】或者【确定】即可:
上述方法同样适合于多层包扎类容器,多层包扎容器传感器一般放置在环缝附近,立式容器的传感器垂直层间距和卧式容器的传感器水平间距一般为环缝间距离
